A little theory
Based on Hall, S. G., Swamy, P. A. V. B. & Tavlas, G. S. (2015),
A Note on Generalizing the Concept of Cointegration.
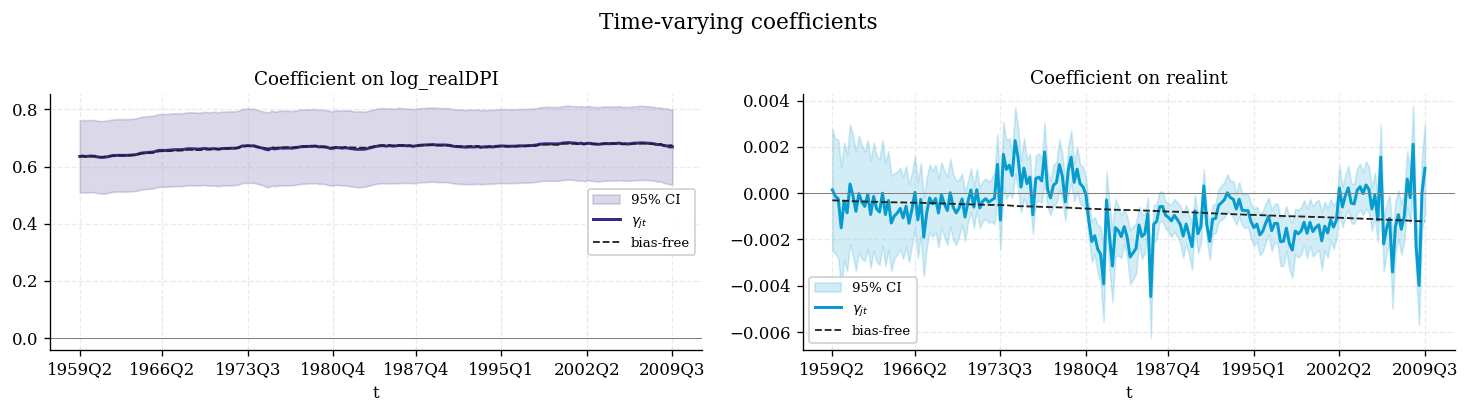
Any (possibly nonlinear) structural relationship \(y_t=f_t(x_t,w_t)\) can be
represented exactly as a model that is linear in variables but with
time-varying coefficients:
$$ y_t=\gamma_{0t}+\gamma_{1t}x_{1t}+\dots+\gamma_{K-1,t}x_{K-1,t} $$
Each coefficient is driven by observable coefficient drivers
\(z_{dt}\) plus a random error (Assumption 1):
$$ \gamma_{jt}=\pi_{j0}+\sum_{d}\pi_{jd}\,z_{dt}+\varepsilon_{jt} $$
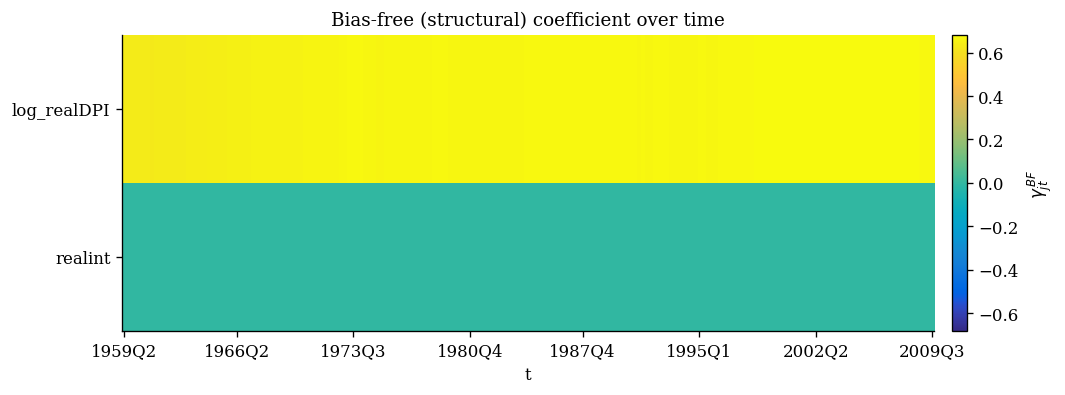
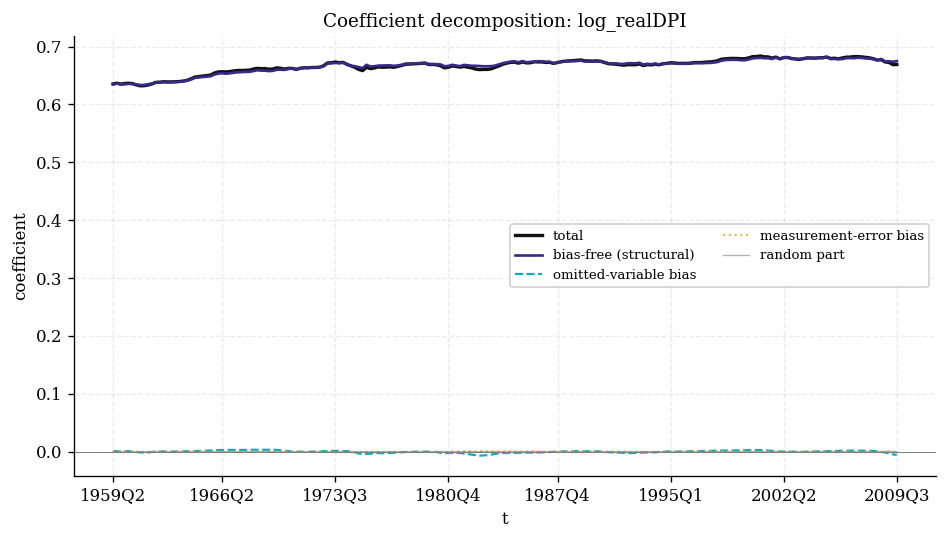
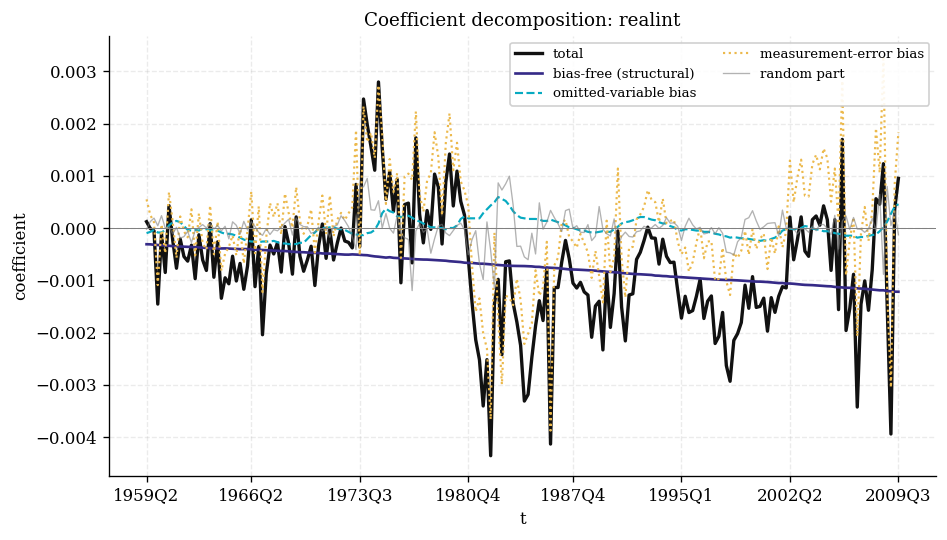
The drivers are split into three sets so the coefficient decomposes into a
bias-free structural part plus omitted-variable
and measurement-error biases. Two variables are
generalized-cointegrated when — holding all other relevant
preexisting conditions \(w\) constant — the bias-free part of the derivative is
nonzero:
$$ \frac{\partial y_t}{\partial x_t}\neq 0 \quad\Longleftrightarrow\quad \text{generalized cointegration.} $$
Substituting the driver equations into the model yields a concentrated linear
model \(y_t=w_t'\pi+u_t\) with a heteroskedastic but stationary
error, estimated by iteratively rescaled GLS. Because the test
statistic derives from the stationary driver-equation errors, inference is
standard — no unit-root critical values.
Honest caveat. As in the paper, validity rests
on choosing drivers that genuinely span the bias components (Assumption 1).
This is an identifying assumption, not something the data can confirm — pick
drivers plausibly correlated with the suspected misspecification.